3.8.Array Allocation and Access
\(3.8.\)Array Allocation and Access
1.Pointer Arithmetic
Suppose the starting address of integer array E and
integer index i are stored in registers %rdx
and %rcx. Below are some assembly-code implementation of
array expressions, with the result being stored in either
%eax(for data) or register %rax(for
pointers):
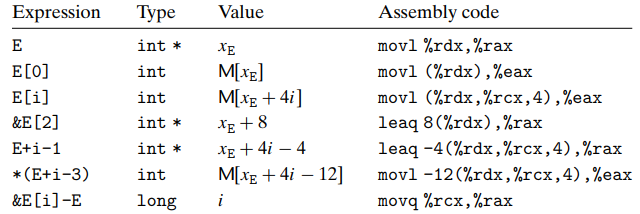
The dereference of a pointer is through
(register_name).
The final example shows that one can compute the difference of two pointers within the same data structure, with the result being data having type long and value equal to the difference of the two addresses divided by the size of the data type.
2.Nested Arrays
The array elements are ordered in memory in row-major order:
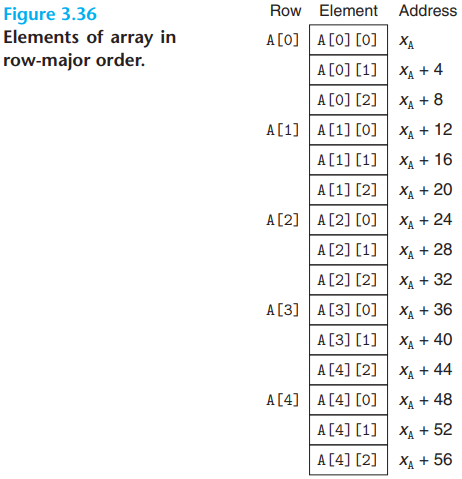
Array element M[i][j] can be easily reached through a
series of arithmetic operations. For example:
1 | # A in %rdi, i in %rsi, and j in %rdx |
3.Fixed-sized Arrays
The C compiler is able to make many optimizations for code operating on multi-dimensional arrays of fixed size. Take the inner product calculation program as an example. The original form is as below:
1 | /* Compute i,k of fixed matrix product */ |
The optimized C code is as below:
1 | /* Compute i,k of fixed matrix product */ |
The optimization follows the following steps:
Generating a pointer, which we have named
Aptr, that points to successive elements in rowiofA.Generating a pointer, which we have named
Bptr, that points to successive elements in columnkofB.Generating a pointer, which we have named
Bend, that equals the valueBptrwill have when it is time to terminate the loop.
The key points of optimization are as below:
Decide the starting address and end address of the array.
Decide how to move the address forward.
\(e.g.\)The C program below:
1 | /* Set all diagonal elements to val */ |
With the properties:
Starting address:
&A[0][0].Ending address:
&A[N+1][0].Moving stride:
index += N + 1.
And the optimized program:
1 | void fix_set_diag_opt(fix_matrix A, int val) |
4.Variable-Size Arrays
Programmers requiring variable-size arrays had to allocate storage
for these arrays using functions such as malloc or
calloc, and they had to explicitly encode the mapping of
multidimensional arrays into single-dimension ones via row-major
indexing.
If we declare an array int A[exp1][exp2], the
dimensions of the array are determined by evaluating the expressions
expr1 and expr2 at the time the
declaration is encountered.
For example, the following C program:
1 | int var_ele(long n, int A[n][n], long i, long j) { |
can be translated into the following assembly code:
1 | var_ele: |
Instead of using leaq, the dynamic version
must use imul to scale i by
n. This is because we don't know the exact size of
array until encounter the declaration.
The optimization of variable-size arrays is similar to that of the fixed-size:
For example, the C program:
1 | int var_prod_ele(long n, int A[n][n], int B[n][n], long i, long k) { |
can be optimized as:
1 | /* Compute i,k of variable matrix product */ |
We can see that
GCCis able to recognize patterns that arise when a program steps through the elements of a multidimensional array, and generate the pointer-based code or the array-based code to avoid direct multiple calculation.