深度学习自然语言处理 1. 引入 在之前的讨论中,我们已经明确了非线性分类器的必要性,因为大多数数据并不是线性可分的 ,因此使用线性分类器的分类性能会受到限制。
神经网络是一类具有非线性决策边界的分类器 。
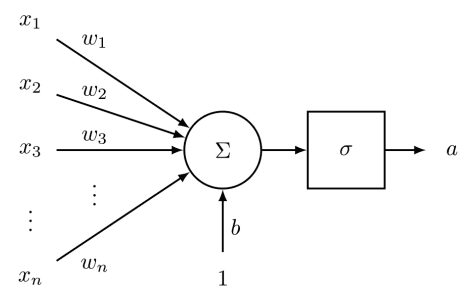
2. 神经元 a . a. a . 神经元是一个通用的计算单元,它接受 n n n
一个比较常见的神经元类型是 S i g m o i d Sigmoid S i g m o i d n n n w w w b b b
a = 1 1 + exp ( − [ w T b ] ⋅ [ x 1 ] ) a = \frac{1}{1 + \exp(-[w^T \ b] \cdot [x \ 1])} a = 1 + exp ( − [ w T b ] ⋅ [ x 1 ]) 1 其传递方式如下图:
b . b. b . 我们将上述概念扩展到多个神经元,考虑将输入 x x x w ( 1 ) , ⋯ , w ( m ) w^{(1)}, \cdots, w^{(m)} w ( 1 ) , ⋯ , w ( m ) b 1 , ⋯ , b m b_1, \cdots, b_m b 1 , ⋯ , b m a 1 , ⋯ , a m a_1, \cdots, a_m a 1 , ⋯ , a m
a 1 = 1 1 + exp ( w ( 1 ) T x + b 1 ) , . . . , a m = 1 1 + exp ( w ( m ) T x + b m ) a_1 = \frac{1}{1 + \exp(w^{(1)T}x + b_1)} ,. . . ,a_m = \frac{1}{1 + \exp(w^{(m)T}x + b_m)} a 1 = 1 + exp ( w ( 1 ) T x + b 1 ) 1 , ... , a m = 1 + exp ( w ( m ) T x + b m ) 1 c . c. c . 为了便于表达,我们定义以下的符号:
σ ( z ) = [ 1 1 + exp ( z 1 ) ⋮ 1 1 + exp ( z m ) ] \sigma(z) = \begin{bmatrix} \frac{1}{1+\exp(z_1)} \\ \vdots \\ \frac{1}{1+\exp(z_m)} \end{bmatrix} σ ( z ) = 1 + e x p ( z 1 ) 1 ⋮ 1 + e x p ( z m ) 1 b = [ b 1 ⋮ b m ] ∈ R m b = \begin{bmatrix} b_1 \\ \vdots \\ b_m \end{bmatrix} \in \mathbb{R}^m b = b 1 ⋮ b m ∈ R m W = [ − w ( 1 ) T − ⋮ − w ( m ) T − ] ∈ R m × n W = \begin{bmatrix} - w^{(1)T} - \\ \vdots \\ - w^{(m)T} - \end{bmatrix} \in \mathbb{R}^{m \times n} W = − w ( 1 ) T − ⋮ − w ( m ) T − ∈ R m × n 现在我们就可以将缩放和偏置的输出写为:
z = W x + b z = Wx + b z = W x + b 而 S i g m o i d Sigmoid S i g m o i d
[ a 1 ⋮ a m ] = σ ( z ) = σ ( W x + b ) \begin{bmatrix} a_1 \\ \vdots \\ a_m \end{bmatrix} = \sigma(z) = \sigma(Wx + b) a 1 ⋮ a m = σ ( z ) = σ ( W x + b ) 这些激活值可以作为一系列指标集合,我们可以进一步组合这些特征值 来执行分类任务。
这也是为什么我们要一个中间层 a a a x x x “组合特征”或“交互关系” ,而不仅仅是单个输入特征。
d . d. d . z = W x + b z = Wx + b z = W x + b x x x x x x b b b a = σ ( z ) a = \sigma(z) a = σ ( z ) z z z s i g m o i d sigmoid s i g m o i d [ 0 , 1 ] [0, 1] [ 0 , 1 ] s = U T a s = U^Ta s = U T a s s s 3. 反向传播 a . a. a . 像大多数机器学习模型一样,神经网络也需要一个优化目标函数。
假设一个问题的正确结果为 r e s res res r e s res res s s s r e s res res s c s_c s c
s c = U T f ( W x c + b ) , s = U T f ( W x + b ) s_c = U^Tf(Wx_c + b), s = U^Tf(Wx + b) s c = U T f ( W x c + b ) , s = U T f ( W x + b ) 我们的目标函数就变成 min ( s c − s ) \min(s_c - s) min ( s c − s )
进一步地,我们只关注 s s s s c s_c s c
min J = max ( s c − s , 0 ) \min J=\max(s_c-s, 0) min J = max ( s c − s , 0 ) 然而,如果 s c s_c s c s s s 安全边界,让 s s s s c s_c s c Δ \Delta Δ ,我们的目标函数变为:
min J = max ( s c − s + Δ , 0 ) \min J=\max(s_c-s+\Delta, 0) min J = max ( s c − s + Δ , 0 ) b . b. b . 我们讨论当 J J J
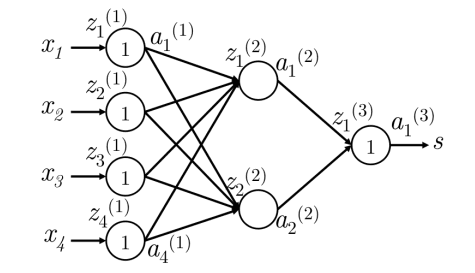
θ ( t + 1 ) = θ ( t ) − α ∇ θ ( t ) J \theta^{(t+1)} = \theta^{(t)} - \alpha \nabla_{\theta^{(t)}} J θ ( t + 1 ) = θ ( t ) − α ∇ θ ( t ) J 我们可以通过链式法则 来计算任意参数的损失梯度。我们以下面的神经网络为例:
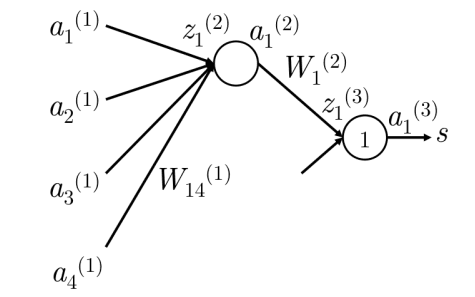
i . i. i . x i x_i x i s s s 每一层(包括输入层和输出层)都有接收输入并产生输出的神经元。第 k k k j j j z j ( k ) z_j^{(k)} z j ( k ) a j ( k ) a_j^{(k)} a j ( k ) 我们将在 z j ( k ) z_j^{(k)} z j ( k ) δ j ( k ) \delta_j^{(k)} δ j ( k ) 第 1 层指的是输入层,而不是第一个隐藏层。对于输入层,x j = z j ( 1 ) = a j ( 1 ) x_j = z_j^{(1)} = a_j^{(1)} x j = z j ( 1 ) = a j ( 1 ) W i j ( k ) W^{(k)}_{ij} W ij ( k ) k k k ( k + 1 ) (k+1) ( k + 1 ) j → i j\rightarrow i j → i 为保持定义与符号的统一,我们让:W ( 1 ) = W W^{(1)} = W W ( 1 ) = W W ( 2 ) = U W^{(2)} = U W ( 2 ) = U i i . ii. ii . 首先应该明确: W 14 ( 1 ) W_{14}^{(1)} W 14 ( 1 ) z 1 ( 2 ) z_1^{(2)} z 1 ( 2 ) a 1 ( 2 ) a_1^{(2)} a 1 ( 2 ) 只受它们所贡献的值的影响 。
而在我们的损失函数 s c + 1 − s s_c + 1 - s s c + 1 − s
∂ J ∂ s = − ∂ J ∂ s c = − 1 \frac{\partial J}{\partial s} = - \frac{\partial J}{\partial s_c} = -1 ∂ s ∂ J = − ∂ s c ∂ J = − 1 则:
∂ s ∂ W i j ( 1 ) = ∂ W ( 2 ) a ( 2 ) ∂ W i j ( 1 ) = ∂ W i ( 2 ) a i ( 2 ) ∂ W i j ( 1 ) = W i ( 2 ) ∂ a i ( 2 ) ∂ W i j ( 1 ) \begin{aligned} \frac{\partial s}{\partial W_{ij}^{(1)}} = \frac{\partial W^{(2)} a^{(2)}}{\partial W_{ij}^{(1)}} = \frac{\partial W_i^{(2)} a_i^{(2)}}{\partial W_{ij}^{(1)}} = W_i^{(2)} \frac{\partial a_i^{(2)}}{\partial W_{ij}^{(1)}} \\ \end{aligned} ∂ W ij ( 1 ) ∂ s = ∂ W ij ( 1 ) ∂ W ( 2 ) a ( 2 ) = ∂ W ij ( 1 ) ∂ W i ( 2 ) a i ( 2 ) = W i ( 2 ) ∂ W ij ( 1 ) ∂ a i ( 2 ) ⇒ W i ( 2 ) ∂ a i ( 2 ) ∂ W i j ( 1 ) = W i ( 2 ) ∂ a i ( 2 ) ∂ z i ( 2 ) ∂ z i ( 2 ) ∂ W i j ( 1 ) = W i ( 2 ) f ( z i ( 2 ) ) ∂ z i ( 2 ) ∂ z i ( 2 ) ∂ z i ( 2 ) ∂ W i j ( 1 ) = W i ( 2 ) f ′ ( z i ( 2 ) ) ∂ z i ( 2 ) ∂ W i j ( 1 ) = W i ( 2 ) f ′ ( z i ( 2 ) ) ∂ ∂ W i j ( 1 ) ( b i ( 1 ) + a 1 ( 1 ) W i 1 ( 1 ) + a 2 ( 1 ) W i 2 ( 1 ) + a 3 ( 1 ) W i 3 ( 1 ) + a 4 ( 1 ) W i 4 ( 1 ) ) = W i ( 2 ) f ′ ( z i ( 2 ) ) ∂ ∂ W i j ( 1 ) ( b i ( 1 ) + ∑ k a k ( 1 ) W i k ( 1 ) ) = W i ( 2 ) f ′ ( z i ( 2 ) ) a j ( 1 ) = δ i ( 2 ) ⋅ a j ( 1 ) \begin{aligned} &\Rightarrow W_i^{(2)} \frac{\partial a_i^{(2)}}{\partial W_{ij}^{(1)}} = W_i^{(2)} \frac{\partial a_i^{(2)}}{\partial z_i^{(2)}} \frac{\partial z_i^{(2)}}{\partial W_{ij}^{(1)}} \\ &= W_i^{(2)} f(z_i^{(2)}) \frac{\partial z_i^{(2)}}{\partial z_i^{(2)}} \frac{\partial z_i^{(2)}}{\partial W_{ij}^{(1)}} \\ &= W_i^{(2)} f'(z_i^{(2)}) \frac{\partial z_i^{(2)}}{\partial W_{ij}^{(1)}} \\ &= W_i^{(2)} f'(z_i^{(2)}) \frac{\partial}{\partial W_{ij}^{(1)}} \left( b_i^{(1)} + a_1^{(1)} W_{i1}^{(1)} + a_2^{(1)} W_{i2}^{(1)} + a_3^{(1)} W_{i3}^{(1)} + a_4^{(1)} W_{i4}^{(1)} \right) \\ &= W_i^{(2)} f'(z_i^{(2)}) \frac{\partial}{\partial W_{ij}^{(1)}} \left( b_i^{(1)} + \sum_k a_k^{(1)} W_{ik}^{(1)} \right) \\ &= W_i^{(2)} f'(z_i^{(2)}) a_j^{(1)} \\ &= \delta_i^{(2)} \cdot a_j^{(1)} \end{aligned} ⇒ W i ( 2 ) ∂ W ij ( 1 ) ∂ a i ( 2 ) = W i ( 2 ) ∂ z i ( 2 ) ∂ a i ( 2 ) ∂ W ij ( 1 ) ∂ z i ( 2 ) = W i ( 2 ) f ( z i ( 2 ) ) ∂ z i ( 2 ) ∂ z i ( 2 ) ∂ W ij ( 1 ) ∂ z i ( 2 ) = W i ( 2 ) f ′ ( z i ( 2 ) ) ∂ W ij ( 1 ) ∂ z i ( 2 ) = W i ( 2 ) f ′ ( z i ( 2 ) ) ∂ W ij ( 1 ) ∂ ( b i ( 1 ) + a 1 ( 1 ) W i 1 ( 1 ) + a 2 ( 1 ) W i 2 ( 1 ) + a 3 ( 1 ) W i 3 ( 1 ) + a 4 ( 1 ) W i 4 ( 1 ) ) = W i ( 2 ) f ′ ( z i ( 2 ) ) ∂ W ij ( 1 ) ∂ ( b i ( 1 ) + k ∑ a k ( 1 ) W ik ( 1 ) ) = W i ( 2 ) f ′ ( z i ( 2 ) ) a j ( 1 ) = δ i ( 2 ) ⋅ a j ( 1 ) 梯度简化为 δ i ( 2 ) ⋅ a j ( 1 ) \delta_i^{(2)} \cdot a_j^{(1)} δ i ( 2 ) ⋅ a j ( 1 ) δ i ( 2 ) \delta_i^{(2)} δ i ( 2 ) 从第 2 层第 i 个神经元向后传播的误差 。a j ( 1 ) a_j^{(1)} a j ( 1 ) 在按 W i j W_{ij} W ij 。
可以将这个公式理解为:一个权重的总责任 = 下游节点错误 × 自己发送的信号强度 \text{一个权重的总责任}= \text{下游节点错误} \times \text{自己发送的信号强度} 一个权重的总责任 = 下游节点错误 × 自己发送的信号强度
i i i . iii. iii . 我们以下面这个网络为例:
我们从一个从 a 1 ( 3 ) a_1^{(3)} a 1 ( 3 ) 我们将这个误差乘以将 z 1 ( 3 ) z_1^{(3)} z 1 ( 3 ) a 1 ( 3 ) a_1^{(3)} a 1 ( 3 ) δ 1 ( 3 ) = 1 \delta_1^{(3)} = 1 δ 1 ( 3 ) = 1 此时,误差信号 1 已经到达 z 1 ( 3 ) z_1^{(3)} z 1 ( 3 ) a 1 ( 2 ) a_1^{(2)} a 1 ( 2 ) z 1 ( 3 ) z_1^{(3)} z 1 ( 3 ) δ 1 ( 3 ) \delta_1^{(3)} δ 1 ( 3 ) × W 1 ( 2 ) = W 1 ( 2 ) \times W_1^{(2)} = W_1^{(2)} × W 1 ( 2 ) = W 1 ( 2 ) a 1 ( 2 ) a_1^{(2)} a 1 ( 2 ) W 1 ( 2 ) W_1^{(2)} W 1 ( 2 ) 正如我们在步骤 2 中所做的,我们需要将误差移动过将 z 1 ( 2 ) z_1^{(2)} z 1 ( 2 ) a 1 ( 2 ) a_1^{(2)} a 1 ( 2 ) 。我们通过将 a 1 ( 2 ) a_1^{(2)} a 1 ( 2 ) f ′ ( z 1 ( 2 ) ) f'(z_1^{(2)}) f ′ ( z 1 ( 2 ) ) 因此,z 1 ( 2 ) z_1^{(2)} z 1 ( 2 ) f ′ ( z 1 ( 2 ) ) W 1 ( 2 ) f'(z_1^{(2)}) W_1^{(2)} f ′ ( z 1 ( 2 ) ) W 1 ( 2 ) δ 1 ( 2 ) \delta_1^{(2)} δ 1 ( 2 ) 最后,我们需要将误差的“公平份额”分配给 W 14 ( 1 ) W_{14}^{(1)} W 14 ( 1 ) ,只需将其乘以它负责转发的输入,这个输入恰好是 a 4 ( 1 ) a_4^{(1)} a 4 ( 1 ) 因此,损失相对于 W 14 ( 1 ) W_{14}^{(1)} W 14 ( 1 ) a 4 ( 1 ) f ′ ( z 1 ( 2 ) ) W 1 ( 2 ) a_4^{(1)} f'(z_1^{(2)}) W_1^{(2)} a 4 ( 1 ) f ′ ( z 1 ( 2 ) ) W 1 ( 2 )
c . c. c . 偏置项b 1 ( 1 ) b_1^{(1)} b 1 ( 1 ) 等同于对神经元输入(z 1 ( 2 ) z_1^{(2)} z 1 ( 2 ) ,只要其前向传播的输入为 1。因此,第 k k k i i i δ i ( k ) \delta_i^{(k)} δ i ( k ) b 1 ( 1 ) b_1^{(1)} b 1 ( 1 ) W 14 ( 1 ) W_{14}^{(1)} W 14 ( 1 ) f ′ ( z 1 ( 2 ) ) W 1 ( 2 ) f'(z_1^{(2)})W_1^{(2)} f ′ ( z 1 ( 2 ) ) W 1 ( 2 )
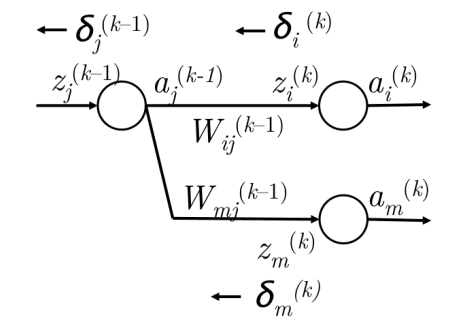
d . d. d . 将 δ ( k ) \delta^{(k)} δ ( k ) δ ( k − 1 ) \delta^{(k-1)} δ ( k − 1 )
我们通过将 δ i ( k ) \delta_i^{(k)} δ i ( k ) W i j ( k − 1 ) W_{ij}^{(k-1)} W ij ( k − 1 ) a j ( k − 1 ) a_j^{(k-1)} a j ( k − 1 ) 在 a j ( k − 1 ) a_j^{(k-1)} a j ( k − 1 ) δ i ( k ) W i j ( k − 1 ) \delta_i^{(k)} W_{ij}^{(k-1)} δ i ( k ) W ij ( k − 1 ) 然而,a j ( k − 1 ) a_j^{(k-1)} a j ( k − 1 ) k k k m m m a j ( k − 1 ) a_j^{(k-1)} a j ( k − 1 ) δ i ( k ) W i j ( k − 1 ) + δ m ( k ) W m j ( k − 1 ) \delta_i^{(k)} W_{ij}^{(k-1)} + \delta_m^{(k)} W_{mj}^{(k-1)} δ i ( k ) W ij ( k − 1 ) + δ m ( k ) W mj ( k − 1 ) 实际上,我们可以将其推广为 ∑ i δ i ( k ) W i j ( k − 1 ) \sum_i \delta_i^{(k)} W_{ij}^{(k-1)} ∑ i δ i ( k ) W ij ( k − 1 )
现在我们得到了在 a j ( k − 1 ) a_j^{(k-1)} a j ( k − 1 ) f ′ ( z j ( k − 1 ) ) f'(z_j^{(k-1)}) f ′ ( z j ( k − 1 ) ) z j ( k − 1 ) z_j^{(k-1)} z j ( k − 1 ) δ j ( k − 1 ) \delta_j^{(k-1)} δ j ( k − 1 ) f ′ ( z j ( k − 1 ) ) ∑ i δ i ( k ) W i j ( k − 1 ) f'(z_j^{(k-1)}) \sum_i \delta_i^{(k)} W_{ij}^{(k-1)} f ′ ( z j ( k − 1 ) ) ∑ i δ i ( k ) W ij ( k − 1 ) e . e. e . 到目前为止,我们讨论了如何计算模型中给定参数的梯度。在这里,我们将推广上述方法,以便我们可以一次性更新权重矩阵和偏置向量。
对于给定的参数 W i j ( k ) W_{ij}^{(k)} W ij ( k ) δ i ( k + 1 ) ⋅ a j ( k ) \delta_i^{(k+1)} \cdot a_j^{(k)} δ i ( k + 1 ) ⋅ a j ( k ) W ( k ) W^{(k)} W ( k )
∇ W ( k ) = [ δ 1 ( k + 1 ) a 1 ( k ) δ 1 ( k + 1 ) a 2 ( k ) ⋯ δ 2 ( k + 1 ) a 1 ( k ) δ 2 ( k + 1 ) a 2 ( k ) ⋯ ⋮ ⋮ ⋱ ] = δ ( k + 1 ) a ( k ) T \nabla_{W^{(k)}} = \begin{bmatrix} \delta_1^{(k+1)} a_1^{(k)} & \delta_1^{(k+1)} a_2^{(k)} & \cdots \\ \delta_2^{(k+1)} a_1^{(k)} & \delta_2^{(k+1)} a_2^{(k)} & \cdots \\ \vdots & \vdots & \ddots \end{bmatrix} = \delta^{(k+1)} a^{(k)T} ∇ W ( k ) = δ 1 ( k + 1 ) a 1 ( k ) δ 2 ( k + 1 ) a 1 ( k ) ⋮ δ 1 ( k + 1 ) a 2 ( k ) δ 2 ( k + 1 ) a 2 ( k ) ⋮ ⋯ ⋯ ⋱ = δ ( k + 1 ) a ( k ) T 因此,我们可以使用传播到矩阵的误差向量和由该矩阵前向传播的激活值的外积来编写整个矩阵梯度。我们可以将广义步骤中得到的公式推广到矩阵上:
δ ( k ) = f ′ ( z ( k ) ) ∘ ( W ( k ) T δ ( k + 1 ) ) \delta^{(k)} = f'(z^{(k)}) \circ (W^{(k)T} \delta^{(k+1)}) δ ( k ) = f ′ ( z ( k ) ) ∘ ( W ( k ) T δ ( k + 1 ) ) 我们应该减少反向传播中的冗余计算——例如,注意到 δ ( k ) \delta^{(k)} δ ( k ) δ ( k + 1 ) \delta^{(k+1)} δ ( k + 1 ) δ ( k + 1 ) \delta^{(k+1)} δ ( k + 1 ) W ( k ) W^{(k)} W ( k ) δ ( k + 1 ) \delta^{(k+1)} δ ( k + 1 ) δ ( k ) \delta^{(k)} δ ( k ) ( k − 1 ) . . . ( 1 ) (k-1)...(1) ( k − 1 ) ... ( 1 )
4. 正则化 a . a. a . 与许多机器学习模型一样,神经网络非常容易过拟合,即模型能够在训练数据集上获得近乎完美的性能,但丧失了对未见数据的泛化能力。解决过拟合的一种常用技术是引入 L 2 L2 L 2 J J J
J R = J + λ ∑ i = 1 L ∣ ∣ W ( i ) ∣ ∣ F 2 J_R = J + \lambda \sum_{i=1}^{L} ||W^{(i)}||_F^2 J R = J + λ i = 1 ∑ L ∣∣ W ( i ) ∣ ∣ F 2 矩阵 U 的弗罗贝尼乌斯范数定义如下: ∣ ∣ U ∣ ∣ F = ∑ i ∑ j U i j 2 ||U||F = \sqrt{\sum_i \sum_j U{ij}^2} ∣∣ U ∣∣ F = ∑ i ∑ j U ij 2
在上述公式中,∣ ∣ W ( i ) ∣ ∣ F 2 ||W^{(i)}||_F^2 ∣∣ W ( i ) ∣ ∣ F 2 W ( i ) W^{(i)} W ( i ) λ \lambda λ J R J_R J R
由于弗罗贝尼乌斯范数的二次性质,L 2 L2 L 2 λ \lambda λ λ \lambda λ λ \lambda λ
必须注意的是,偏置项不被正则化,也不对上述成本项做出贡献。因为模型的主要“复杂度”和“容量”都体现在权重上。
我们先验地认为,一个**更简单的模型(权重值更接近于0的模型)**是更好的模型。
b . b. b . Dropout 是一种强大的正则化技术,其思想简单而有效:在训练期间,我们在每次前向/后向传播过程中,以一定的概率(1 − p 1-p 1 − p p p p 。然后在测试期间,我们使用完整的网络来计算我们的预测 。结果是,网络通常能从数据中学习到更有意义的信息,更不容易过拟合,并且通常在当前任务上获得更高的整体性能。这项技术之所以如此有效,一个直观的原因是,dropout 本质上是在同时训练指数级数量的较小网络,并对它们的预测进行平均。
在实践中,我们引入 Dropout 的方式是,我们取每层神经元的输出 h h h p p p 只让梯度通过那些在前向传播中被保留下来的神经元 。最后,在测试期间,我们使用网络中的所有神经元计算前向传播。
然而,一个关键的细节是,为了让 dropout 有效地工作,测试期间神经元的期望输出应与训练期间大致相同 ——否则输出的量级可能会有根本的不同,网络的行为就不再是良定义的。因此,我们通常必须在测试期间将每个神经元的输出乘 p p p
5. 神经元单元 我们列举一些常见的激活函数:
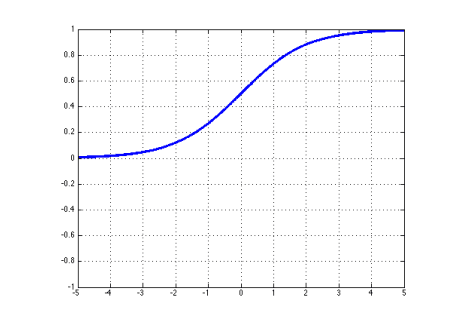
Sigmoid :这是我们在讨论中使用的选择;激活函数 σ \sigma σ σ ( z ) = 1 1 + exp ( − z ) \sigma(z) = \frac{1}{1 + \exp(-z)} σ ( z ) = 1 + exp ( − z ) 1 其梯度为:
σ ′ ( z ) = − exp ( − z ) 1 + exp ( − z ) = σ ( z ) ( 1 − σ ( z ) ) \sigma'(z) = -\frac{\exp(-z)}{1 + \exp(-z)} = \sigma(z)(1 - \sigma(z)) σ ′ ( z ) = − 1 + exp ( − z ) exp ( − z ) = σ ( z ) ( 1 − σ ( z ))
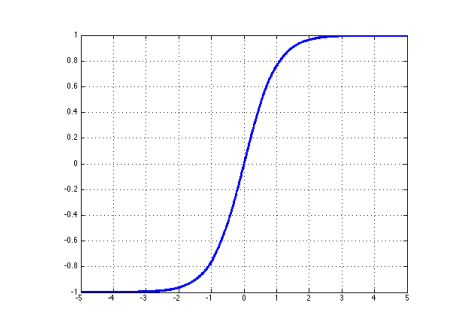
Tanh :tanh 函数是 sigmoid 函数的一种替代方案,在实践中通常发现它收敛得更快。tanh 和 sigmoid 的主要区别在于 tanh 的输出范围是 -1 到 1,而 sigmoid 的范围是 0 到 1:tanh ( z ) = exp ( z ) − exp ( − z ) exp ( z ) + exp ( − z ) = 2 σ ( 2 z ) − 1 \tanh(z) = \frac{\exp(z) - \exp(-z)}{\exp(z) + \exp(-z)} = 2\sigma(2z) - 1 tanh ( z ) = exp ( z ) + exp ( − z ) exp ( z ) − exp ( − z ) = 2 σ ( 2 z ) − 1 其梯度为:
tanh ′ ( z ) = 1 − ( exp ( z ) − exp ( − z ) exp ( z ) + exp ( − z ) ) 2 = 1 − tanh 2 ( z ) \tanh'(z) = 1 - \left( \frac{\exp(z) - \exp(-z)}{\exp(z) + \exp(-z)} \right)^2 = 1 - \tanh^2(z) tanh ′ ( z ) = 1 − ( exp ( z ) + exp ( − z ) exp ( z ) − exp ( − z ) ) 2 = 1 − tanh 2 ( z )
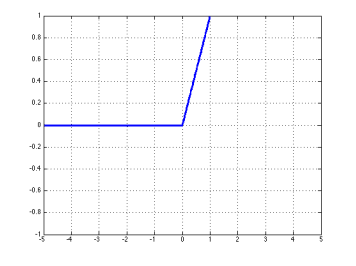
ReLU :ReLU(修正线性单元)函数是一种流行的激活函数选择,因为它即使在 z z z rect ( z ) = max ( z , 0 ) \text{rect}(z) = \max(z, 0) rect ( z ) = max ( z , 0 ) 其梯度为:
rect ′ ( z ) = { 1 : z > 0 0 : otherwise \text{rect}'(z) = \begin{cases} 1 & : z > 0 \ 0 & : \text{otherwise} \end{cases} rect ′ ( z ) = { 1 : z > 0 0 : otherwise
6. 数据预处理 与一般的机器学习模型一样,要确保模型在特定任务上获得合理的性能,一个关键步骤是对数据进行基本的预处理。下面是一些常用的技术。
a. 均值减法 给定一组输入数据 X X X X X X 将这个均值从训练集、验证集和测试集中减去 。
b. 归一化 另一种常用的技术(尽管可能不如均值减法常用)是缩放每个输入特征维度,使其具有相似的量级范围。这很有用,因为输入特征通常以不同的“单位”来衡量,但我们通常希望在初始阶段将所有特征视为同等重要 。我们实现这一点的方法是,简单地将特征除以它们在训练集上计算出的各自的标准差 。
c. 白化 白化不像均值减法+归一化那样常用,它本质上是将数据转换为具有单位协方差矩阵——也就是说,特征变得不相关并且方差为 1。这通常通过首先对数据进行均值减法来完成,得到 X ′ X' X ′ X ′ X' X ′ U , S , V U, S, V U , S , V U T X ′ U^T X' U T X ′ X ′ X' X ′ U U U S S S