8.4.Process Control
\(8.4.\)Process Control
1.Obtaining Process IDs
Each process has a unique positive process ID(PID).
The
getpidfunction returns the PID of the calling process.The
getppidfunction returns the PID of its parent(i.e., the process that created the calling process).
1 |
|
2.Terminating Processes
We can think of a process as being in one of three states:
Running: The process is either executing on the CPU or waiting to be executed and will eventually be scheduled by the kernel.
Stopped: The execution of the process is suspended and will not be scheduled.
Terminated: The process is stopped permanently. This is due to the following reasons:
Receiving a signal whose default action is to terminate the process.
Returning from the main routine.
Calling the
exitfunction.
1 |
|
- The
exitfunction terminates the process with an exit status of status.
The other way to set the exit status is to return an integer value from the main routine.
3.Creating Processes
A parent process creates a new running child
process by calling the fork function.
1 |
|
The newly created child process is almost, identical to the parent:
The child gets an identical(but separate) copy of the parent’s user-level virtual address space.
The child also gets identical copies of any of the parent’s open file descriptors, which means the child can read and write any files that were open in the parent when it called fork.
However, they share different PIDs.
The fork function is called once but it
returns twice.
Since the PID of the child is always nonzero, the return value provides an unambiguous way to tell whether the program is executing in the parent or the child.
Take the following program as an example:
1 | int main() |
When we run the program on the Unix system, we get the following result:
1 | linux> ./fork |
The parent and the child are separate processes that run concurrently, and whether we get the
parent: x=0first orchild: x=2first depends on whether the parent process completes faster than the child process.Since the parent and the child are separate processes, they each have their own private address spaces, so that any subsequent changes that a parent or child makes to
xare private and are not reflected in the memory of the other process.
We can use a process graph to describe the process:

Let's take a look at a more complicate example:
1 | int main() { |
The process graph of the process is as below:
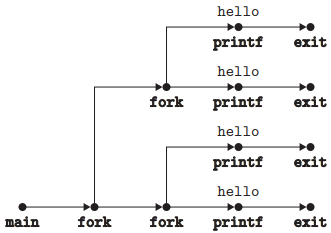
- For a program running on a single processor, any topological sort of the vertices in the corresponding process graph represents a feasible total ordering of the statements in the program.
4.Reaping Child Processes
\(a.\)Basic concept
When a process terminates for any reason, the kernel does not remove it from the system immediately. Instead, the process is kept around in a terminated state until it is reaped by its parent.
When the parent reaps the terminated child, the kernel passes the child's exit status to the parent and then discards the terminated process.
A terminated process that has not yet been reaped is called a zombie.
Even though zombies are not running, they still consume system memory resources.
When a parent process terminates, the kernel arranges for
the init process to become the adopted parent of any
orphaned children. The init process:
has a PID of 1,
is created by the kernel during system start-up,
never terminates
is the ancestor of every process.
\(b.\)Reaping operations
\(i.\)The waitpid function
A process waits for its children to terminate or stop by calling
the waitpid function:
1 |
|
By default(when options = 0),
waitpidsuspends execution of the calling process until a child process in its wait set terminates.If a process in the wait set has already terminated at the time of the call, then
waitpidreturns immediately.Else,
waitpidreturns the PID of the terminated child that causedwaitpidto return.
If
pid > 0, then the wait set is the singleton child process whose process ID is equal topid.If
pid = -1, then the wait set consists of all of the parent's child processes.
\(ii.\)Modifying the default behavior
The default behavior can be modified by setting
options to various combinations of the
WNOHANG, WUNTRACED, and
WCONTINUED constants:
WNOHANG: Return immediately(with a return value of 0) if none of the child processes in the wait set has terminated yet.- The default behavior suspends the calling process until a child terminates, this option, however, allows us to do useful work while waiting for a child to terminate.
WUNTRACED: Suspend execution of the calling process until a process in the wait set becomes either terminated or stopped. Return the PID of the terminated or stopped child that caused the return.- The default behavior returns only for terminated children; this option is useful when you want to check for both terminated and stopped children.
The options can be combined by ORING, for example:
WNOHANG | WUNTRACED: Return immediately, with a return value of 0, if none of the children in the wait set has stopped or terminated, or with a return value equal to the PID of one of the stopped or terminated children.
\(iii.\)Checking the exit status of a reaped child
If the statusp argument is non-NULL, then
waitpid encodes status information about the child that
caused the return in status, which is the value
pointed to by statusp.
The wait.h include file defines several macros for
interpreting the status argument:
WIFEXITED(status): Returns true if the child terminated normally, via a call toexitor areturn.WEXITSTATUS(status): Returns the exit status of a normally terminated child. This status is only defined ifWIFEXITED()returned true.WTERMSIG(status): Returns the number of the signal that caused the child process to terminate. This status is only defined ifWIFSIGNALED()returned true.WIFSTOPPED(status): Returns true if the child that caused the return is currently stopped.WSTOPSIG(status): Returns the number of the signal that caused the child to stop. This status is only defined ifWIFSTOPPED()returned true.
\(iv.\)Error conditions
If the calling process has no children, then
waitpidreturns −1 and setserrnotoECHILD.If the
waitpidfunction was interrupted by a signal, then it returns −1 and sets errno toEINTR.
\(v.\)The wait function
1 |
|
Calling wait(&status) is equivalent to calling
waitpid(-1, &status, 0).
5.Putting Processes to Sleep
1 |
|
Another function that we will find useful is the pause
function, which puts the calling function to sleep
until a signal is received by the process.
1 |
|
6.Loading and Running Programs
\(a.\)The execve function &
executing process
1 |
|
The data structure of argument list and the list of environment variables are as below:
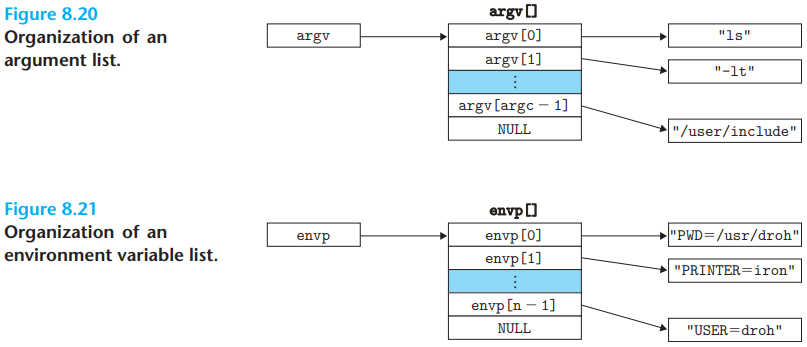
- By convention,
argv[0]is the name of the executable object file.
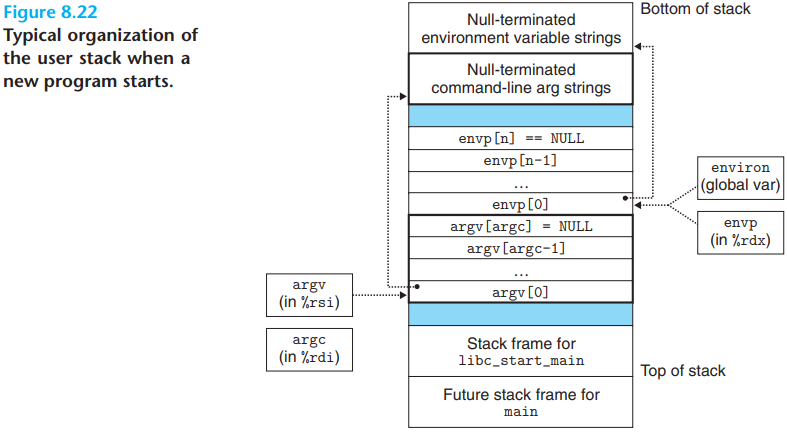
After execve loads filename, it
calls the start-up code. The start-up code sets
up the stack and passes control to the
main routine of the new program, which has a
prototype of the form:
1 | int main(int argc, char **argv, char **envp); |
argc:It gives the number of non-null pointers in theargv[]array.argv:It points to the first entry in theargv[]array.envp:It points to the first entry in theenvp[]array.
The stack has the organization as below:
\(b.\)Manipulating the environment array
1 |
|
The getenv function searches the environment array for a string
name=value. If found, it returns a pointer to value;
otherwise, it returns NULL.
1 |
|
7.Using fork
and execve to Run Programs
- A shell is an interactive application-level program that
runs other programs on behalf of the user. The
original shell was the
shprogram, which was followed by variants such ascsh,tcsh,ksh, andbash.
A shell performs a sequence of read/evaluate steps and then terminates.
The read step reads a command line from the user.
The evaluate step parses the command line and runs programs on behalf of the user.
\(a.\)The main routine of a
simple shell
1 |
|
\(b.\)The evaluating routine
1 | /* eval - Evaluate a command line */ |
1 | /* parseline - Parse the command line and build the argv array */ |
The
phaselinefunction parses the space-separated command-line arguments and builds theargvvector that will eventually be passed toexecve.If the last argument is an '&' character, then parseline returns 1, indicating that the program should be executed in the background(the shell does not wait for it to complete).
Otherwise, it returns 0, indicating that the program should be run in the foreground(the shell waits for it to complete).
After parsing the command line, the
evalfunction calls thebuiltin_commandfunction, which checks whether the first command-line argument is a built-in shell command. If so, it interprets the command immediately and returns 1. Otherwise, it returns 0.If
builtin_commandreturns 0, then the shell creates a child process and executes the requested program inside the child.If the user has asked for the program to run in the background, then the shell returns to the top of the loop and waits for the next command line.
Otherwise the shell uses the
waitpidfunction to wait for the job to terminate. When the job terminates, the shell goes on to the next iteration.