无监督学习
无监督学习
与前面的训练不同,无监督学习只有样本点而没有标签。它的核心目标是在没有外部指导的情况下,发现数据本身固有的结构、模式或关系。
1. 主成分分析
概述
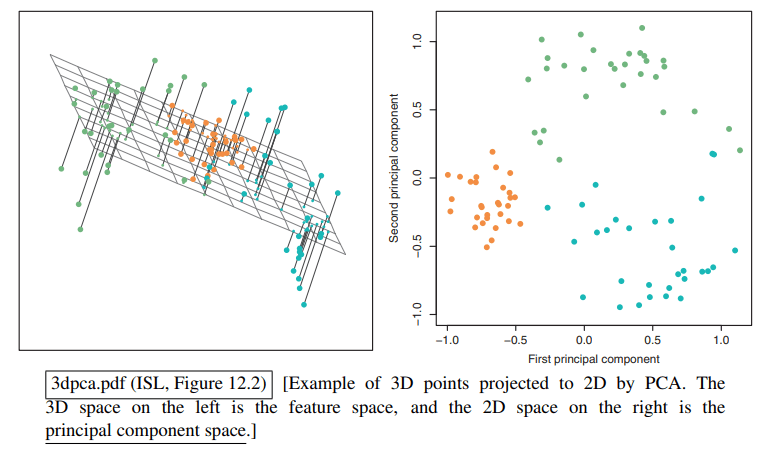
主成分分析 (Principal Components Analysis, PCA) 的目标是:在一个 维的数据空间中,找到 个新的坐标轴(方向),这些新的坐标轴能够捕捉到数据中最大部分的变异性(variation)。换句话说,就是找到最能“概括”数据分布的方向。
PCA 可以降低模型的维度,从而降低计算成本。同时维度特征的减少也可以减少过拟合,让模型更关注核心特征,从而提高泛化能力。
这类似于特征选择,但 PCA 找到的新特征是原始特征的线性组合,而不是简单地从原始特征中挑选。
算法
假设我们的数据是一个 的矩阵 。
首先,我们对数据进行数据中心化:我们计算所有样本的平均值,然后让每个样本点都减去这个平均值。这样,现在的数据表示的是相对于平均值的偏差。
然后我们引入投影 (Projection) 的概念,向量 在方向向量 上的投影为 。PCA 的目标就是找到最好的投影方向 ,使得数据在该方向上的分布最为分散(也即方差最大)。下面我们进行推导。
我们将整个数据矩阵投影到 上:
因为 的均值为 0 (因为已经中心化了),则 的均值也为 0,因此我们需要最大化的方差为:
我们令 ,则问题转变为最大化 。这是一个在数学和物理中非常经典的问题。线性代数中有一个著名的定理(Rayleigh Quotient)告诉我们:对于一个对称矩阵 ,表达式 的最大值,会在 是该矩阵最大特征值 所对应的特征向量时取到,并且最大值本身就是 。
因此,数据的第一主成分就是 的最大特征向量,第二主成分为次大的特征向量,以此类推。
我们可以根据累积方差贡献率来决定选择多少个主成分,如选择 个主成分,使得它们能解释总方差的 95%。
在得到这些主成分后,我们将原始数据点投影到这些主成分上,得到新的 维坐标 ,主成分分析就完成了。
2. 奇异值分解
PCA 算法的问题
在 PCA 中,我们需要计算矩阵 ,这个计算的时间复杂度是 。当特征维度 很大时,这个计算量非常巨大。
同时,计算出的 矩阵可能是一个“病态矩阵”:矩阵的条件数(最大特征值与最小特征值之比)非常大。对于这样的矩阵,计算其特征向量时,微小的计算误差都可能被急剧放大,导致最终结果不准确。而我们计算主成分的方法 会进一步放大这个误差:
为了解决这个问题,可以用 SVD 来寻找 PCA 所需的主成分。
数学推导
由于要获取特征值,我们对 进行特征分解。对于一个方阵 ,它的特征值分解被定义为:
其中:
- 是一个矩阵,它的列向量是 的特征向量。 是一个对角矩阵,它的对角线元素是 A 对应的特征值。
这里的推导可以参见“特征值分解”一章的笔记。
于是我们先得到了标准的分解形式,之后我们会将推导出的式子和这个进行比对:
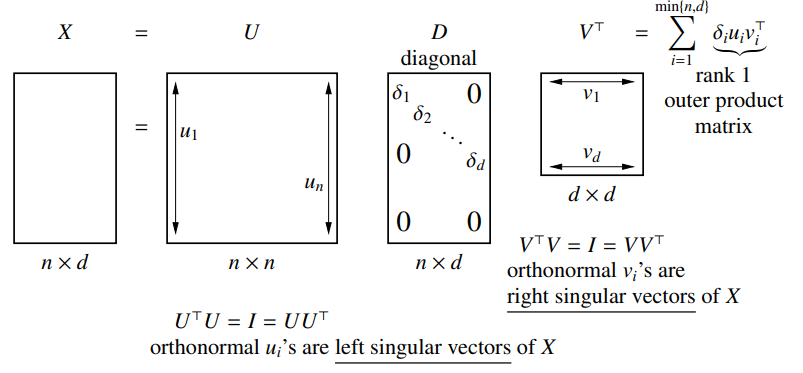
现在我们使用奇异值分解 (SVD):任何一个 维的矩阵 都可以被分解为三个矩阵的乘积:
其中U 是一个 的正交矩阵, 是一个 的对角矩阵, 是一个 的正交矩阵 的转置。
一个额外的补充: 的列向量构成了 的列空间的一组标准正交基; 的行向量构成了 的行空间的一组标准正交基。而 则定义了到这些新的空间的缩放。
关于 SVD 分解的详细讲解可以参照我之前的笔记。
将 SVD 分解的结果代入:
因为 是标准正交的,,则:
这正是前面标准的特征值分解形式,其中:
- 是 的特征向量矩阵。
- 是 的特征值对角矩阵,其对角线上的元素就是 。
SVD 分解相对于 PCA 更稳定:奇异值的比率 通常远小于特征值的比率 。在数值计算中,处理差异没那么悬殊的数字会更稳定、更精确。
主坐标
推导完使用 SVD 的 PCA 后,我们再来看看将 沿主坐标投影会发生什么。由前面的分解:
可以看到,矩阵 的第 行,直接给出了原始数据点 的主坐标。
紧凑 SVD
在实际应用中,很多奇异值可能是0(或者非常接近0)。这些奇异值为0的成分对于重构矩阵 没有任何贡献。因此,我们可以把它们丢掉,这就引出了紧凑SVD。
假设矩阵 的秩为 ,这意味着它只有 个非零的奇异值,我们可以做如下的紧凑 SVD:
这样可以节省存储与运算空间。
3. 聚类
概述
聚类是一种无监督学习方法,它的目标是将数据集中的样本划分成若干个簇(cluster):同一个簇内的数据点彼此之间非常相似,而不同簇之间的数据点则差异很大。
聚类主要有如下的应用场景:
- 探索数据特征,寻找隐藏的模式或群体,在网络结构中寻找社群。
- 构建事物的分类体系。
- 进行数据压缩,将数据中的很多点都使用所属簇的中心点来表达。
k-means
k-means 的目标是将 个数据点划分到 个互不相交的簇中。我们定义:
- : 第 个数据点。
- : 数据点 所属的簇的标签。
- : 第 个簇的均值或中心点 (mean/centroid),为该簇内所有数据点的算术平均值。
- : 第 个簇中数据点的数量。
算法的目标是找到一个最优的簇分配方案 ,使得所有数据点到其所属簇中心点的平方距离之和 (Sum of Squared Errors, SSE) 最小:
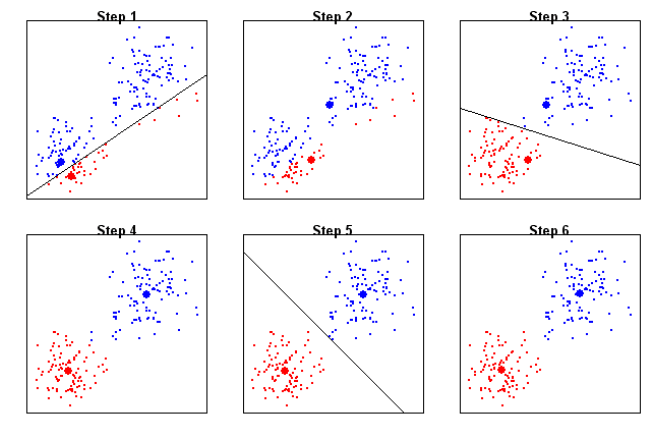
这是一个 NP-hard 问题,如果想找到全局最优解,理论上需要尝试所有可能的划分方式,时间复杂度高达 。为此, k-means 采用了一种启发式策略:我们交替进行下面的步骤:
- 更新均值:固定 计算每个簇的中心点 。
- 更新分配:固定每个簇的中心点 ,将每个数据点 重新分配给离它最近的那个簇中心点 所代表的簇。
- 如果出现距离相等的情况,并且其中一个选项是保持上一次迭代的分配不变,那么就选择保持不变,这有助于算法稳定。
算法在这两个步骤之间不断迭代,直到步骤二不再改变任何数据点的簇分配时,算法收敛并停止。
在 k-means 算法中,初始中心点的选择对最终结果影响很大。常见的初始化方法有:
- Forgy 方法: 随机从数据集中选择 个点作为初始的簇中心点 ,然后直接开始更新分配。
- 随机划分: 将每个数据点随机分配到一个簇,然后开始更新均值。
- k-means++: 这是目前最推荐的方法。它也随机选择初始点,但带有一定的策略:下一个初始中心点的选择会优先考虑那些离已选中心点较远的点。这使得初始中心点能更均匀地散布在数据空间中,从而更容易找到一个好的局部最优解。
下面是 k-means++ 的完整实现,唯一比较麻烦的地方是二阶范数的计算:
def kmeans_pp_nn(X, center_index_0, k, j):
n_samples, n_features = X.shape
centers_indices = [center_index_0]
for _ in range(1, k):
current_center = X[centers_indices]
D = -2 * X @ current_center.T + (X ** 2).sum(axis=1)[:, None] + (current_center ** 2).sum(axis=1)
# Compute the distances of all remaining points to all selected centers
distances = np.min(D, axis=1)
# Sort the list of data points (in decreasing order) by the minimum such distance
sorted_indices = np.argsort(distances)[::-1]
# Choose the jth element of the list in this sorted order as the next center
next_center_index = sorted_indices[j]
centers_indices.append(next_center_index)
return centers_indices
层次聚类
聚类思想
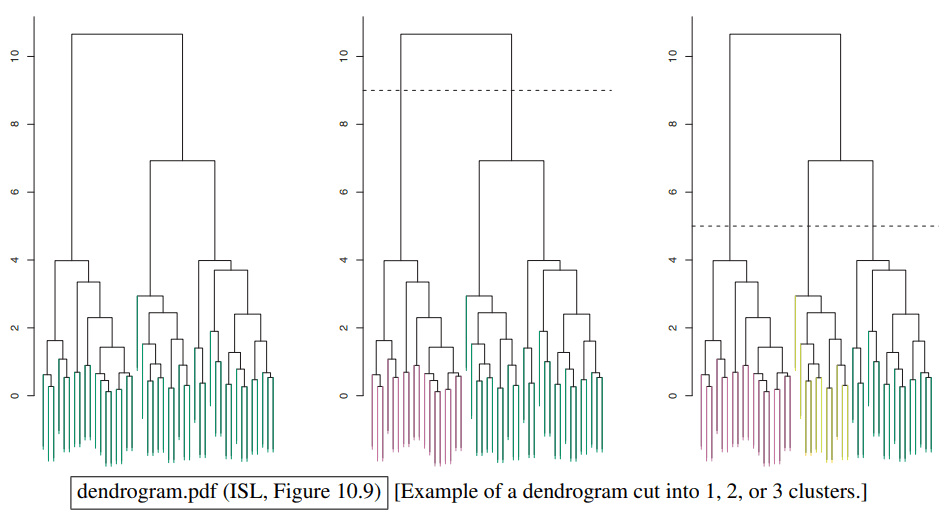
与k-means将数据划分成k个独立的簇不同,层次聚类会创建一个树状的结构(通常是二叉树),这棵树被称为树状图 (Dendrogram)。在这棵树中,每一个子树都代表一个簇:
层次聚类主要有两种方法:
- 自底向上 (Bottom-up),也称为凝聚式聚类 (agglomerative clustering):开始时,每个数据点都自成一簇。然后,算法会重复地将最相似(距离最近)的两个簇合并成一个新簇。这个过程不断重复,直到所有数据点都合并到同一个根簇中。
- 自顶向下 (Top-down),也称为分裂式聚类 (divisive clustering):开始时,所有数据点都在一个大簇中。然后,算法重复地将一个簇分裂成两个最不相似的子簇。这个过程不断重复,直到每个点都自成一簇,或者达到了预设的簇数量。
- 当输入是点集时,凝聚式聚类用得远比分裂式聚类多。但当输入是图时,分裂式聚类(如图分割算法)更常见。
划分方法
对于凝聚式聚类,关键问题是如何衡量两个簇 和 之间的距离 。这由连接方法 (Linkage) 来定义。有如下的连接方法:
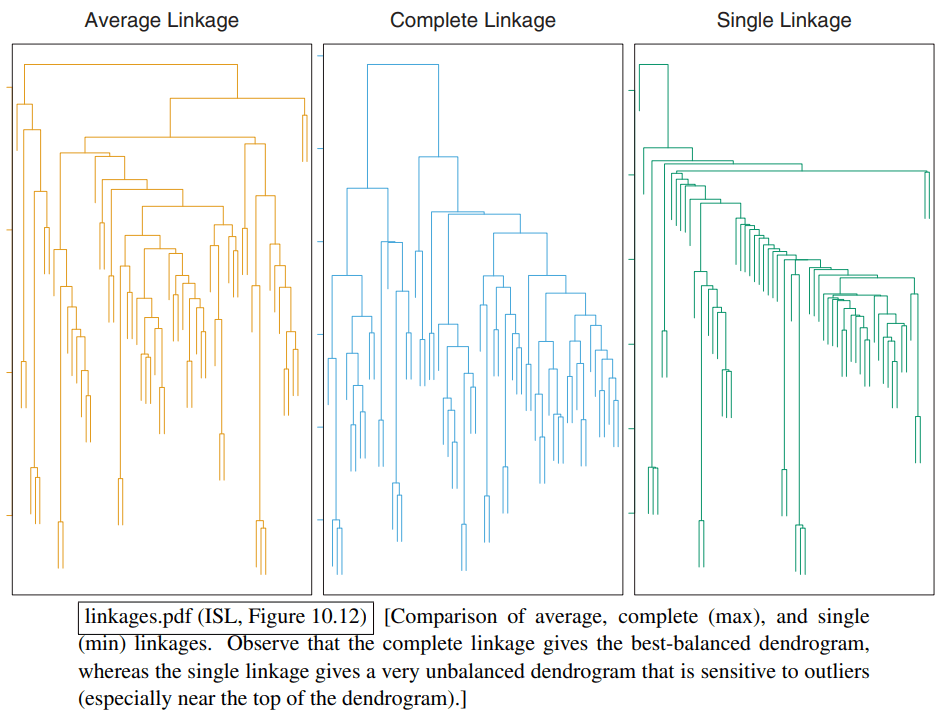
- 完全连接 (complete linkage) 将距离定义为两个簇中最远的两个点之间的距离。只有当 中所有点都和 中所有点靠得足够近时,这两个簇的距离才近。
- 它倾向于产生最平衡的簇。因为它要求一个簇中所有点都和另一个簇中所有点离得近才能合并。当一个簇变大时,它内部最远的点会离其他簇很远,因此大簇更难继续“生长”。
- 单一连接 (single linkage)将距离定义为两个簇中最近的两个点之间的距离。只要 中有一个点和 中有一个点离得近,这两个簇的距离就近。
- 这种连接方式对异常值非常敏感。两个簇只要有一对点离得近,就可能被合并,这容易导致“链式效应”:即一个簇通过一系列中间点不断地“吞并”远处的点,形成一个长链状、不紧凑的簇。这也会导致树的不平衡。
- 平均连接 (average linkage) 将距离定义为两个簇中所有点对之间距离的平均值。它综合考虑了所有点的信息:
- 它是一种介于单一连接和完全连接之间的折中方案,表现通常比较稳健。
- 中心点连接 (centroid linkage) 将距离定义为两个簇的中心点之间的距离。:
完全、单一、平均连接方法适用于任何距离函数 ,但中心点连接只有在使用欧几里得距离时才有明确的物理意义,因为“中心点”的概念通常是基于欧氏空间中的均值来计算的。
对于凝聚式层次聚类,我们通常使用贪心凝聚算法,流程如下:
- 将每个点初始化为一个簇。
- 重复以下步骤,直到只剩一个簇:
- 在当前所有的簇中,找到距离 最小的那一对簇。
- 将这两个簇合并成一个新簇。
注意,到目前为止我们研究的所有聚类算法都是不稳定的:从数据集中删除或微调少数几个样本点,有时可能会导致聚类结果发生巨大变化。
Comments